Freie Thesen betreut vom Fachgebiet Digital Design Unit (Prof. Oliver Tessmann)
In der vom Fachgebiet Digital Design Unit (Prof. Oliver Tessmann) herausgegebenen freien Master-Thesis setzte sich Roger Winkler mit dem Potenzial des Crowdsourcing für die Architektur auseinander. Hierzu hat er einen Konfigurator entwickelt und erforscht, mit dem sich Online-Gemeinschaften als Prosumenten bei er Entwicklung von architektonischen Entwurfsideen einbringen können.
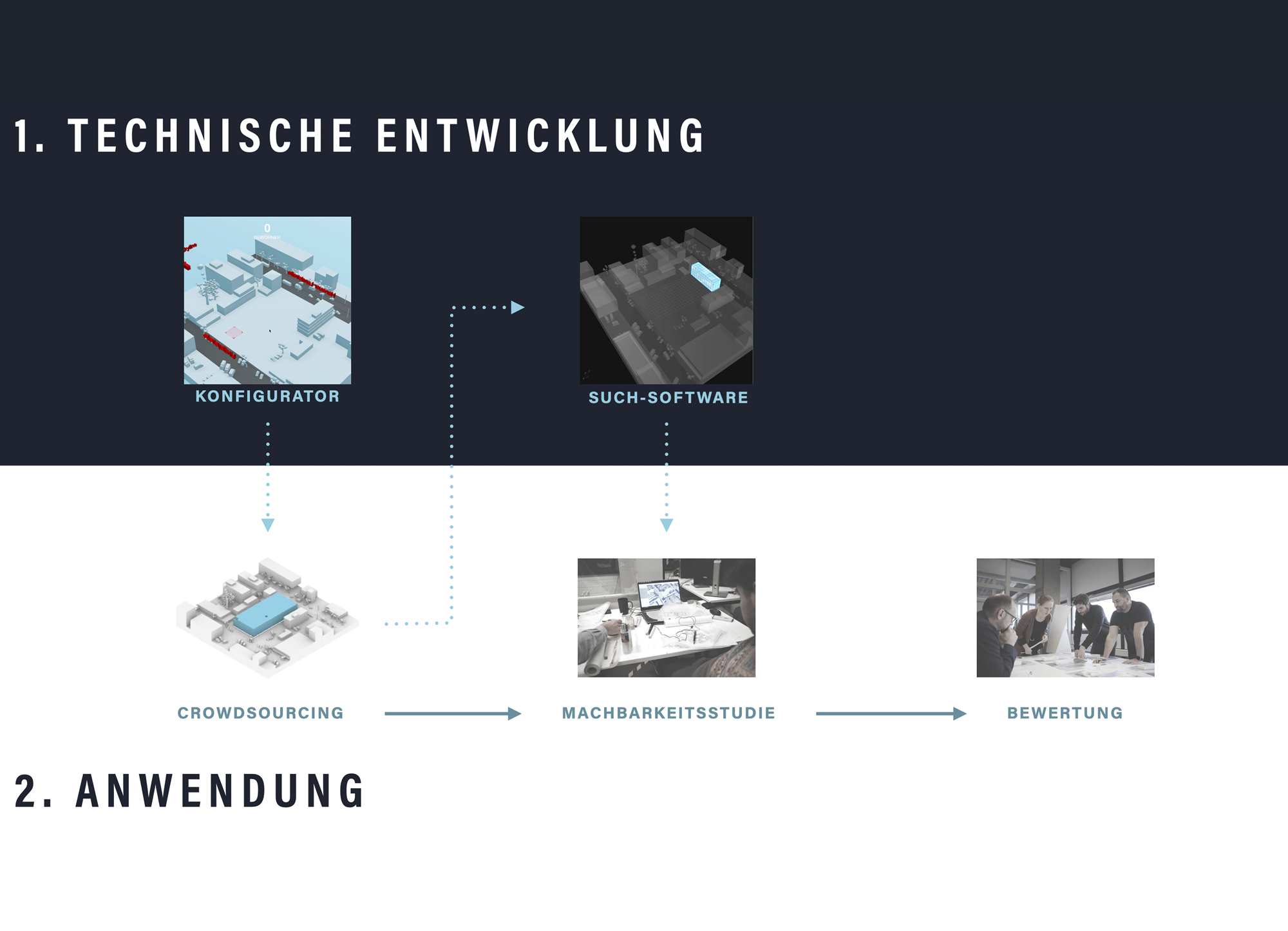
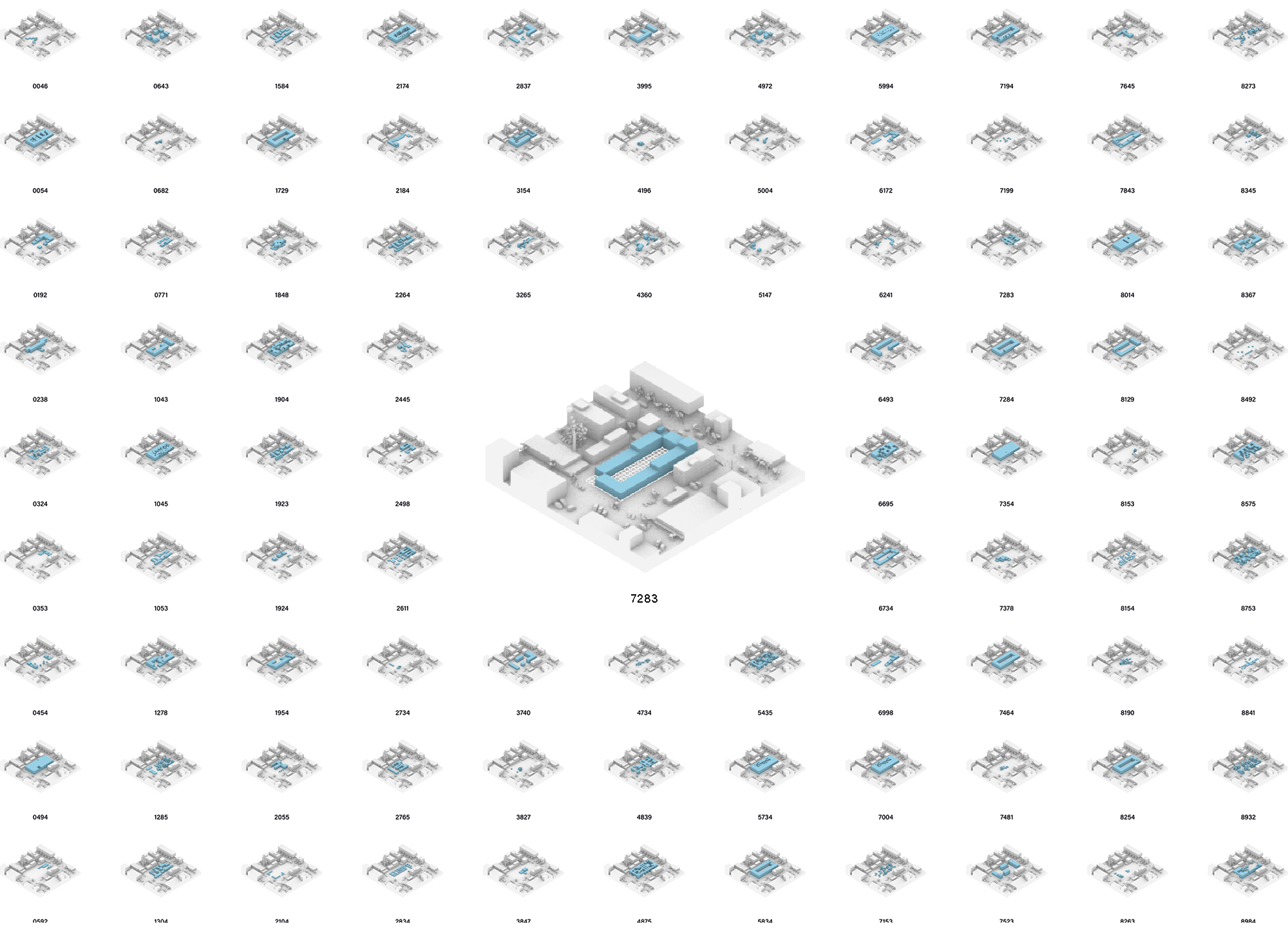
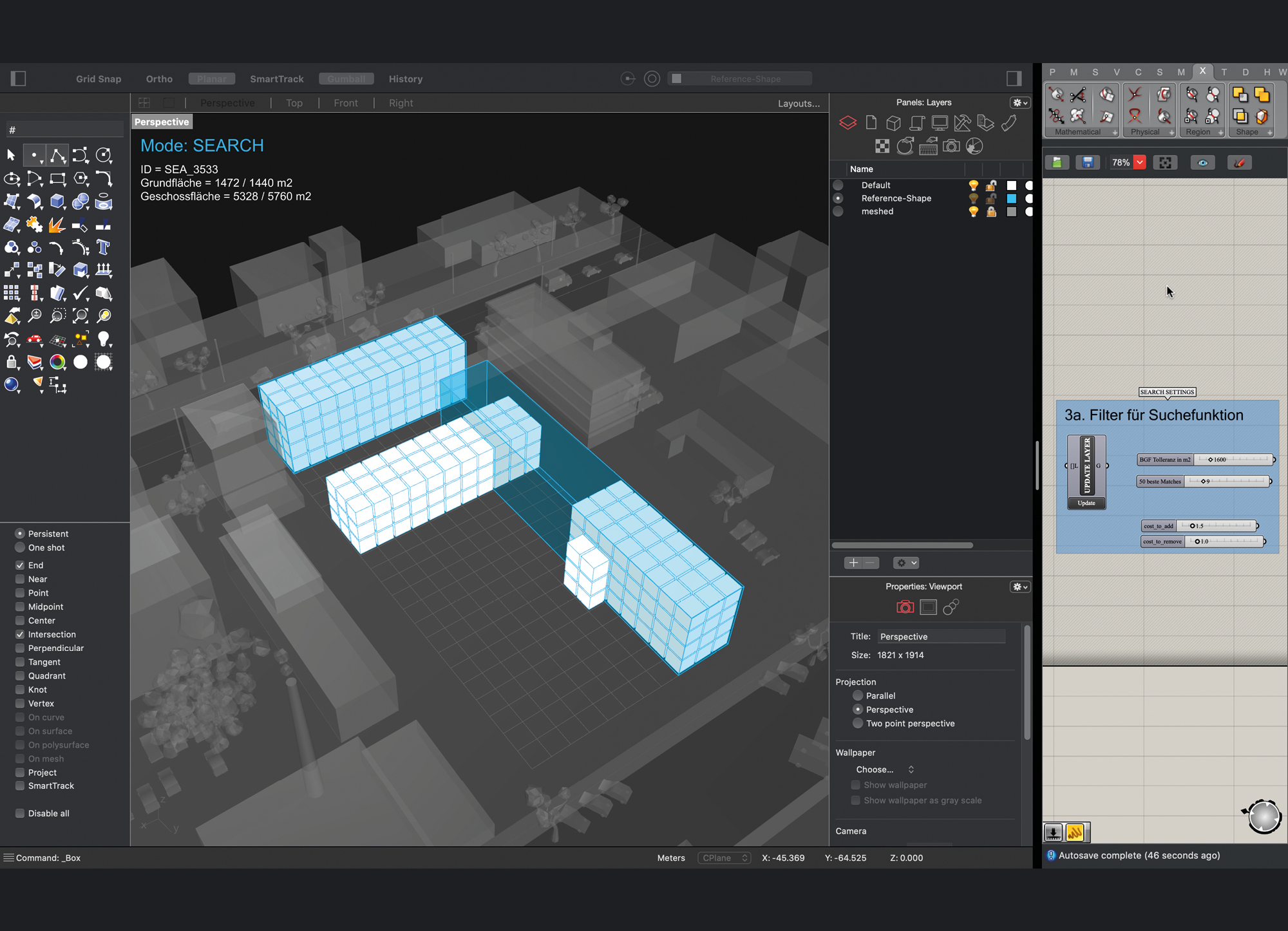
Kernstück dieses Prozesses ist ein Konfigurator, der über eine Webseite gestartet werden kann, damit sich jeder Mensch ortsunabhängig mit dem Projekt auseinandersetzen kann. In dem Konfigurator konnten Ideen für Entwurfsvorschläge entwickelt und mit einem Kommentar versehen eingereicht und auf einem Server gespeichert werden. Damit die gesammelten Daten von Architekten im Entwurfsprozess verwendet werden konnten, wurden zwei Verfahren entwickelt: Mithilfe der Parameter-basierten Suche konnten die Entwürfe nach Parametern, wie beispielsweise BGF, gefiltert werden. Mit einer Autocomplete Funktion wurde der Architekt im digitalen Modellierungsprozess durch Vorschläge aus einer Datenbank unterstützt.
Der in dieser Arbeit entwickelte Prozess versteht sich als Rahmenwerk, und die entwickelten Technologien als erste Bausteine in einer Sammlung. Darüber hinaus gilt es auch die Rollen der Beteiligten Gruppen zu variieren.
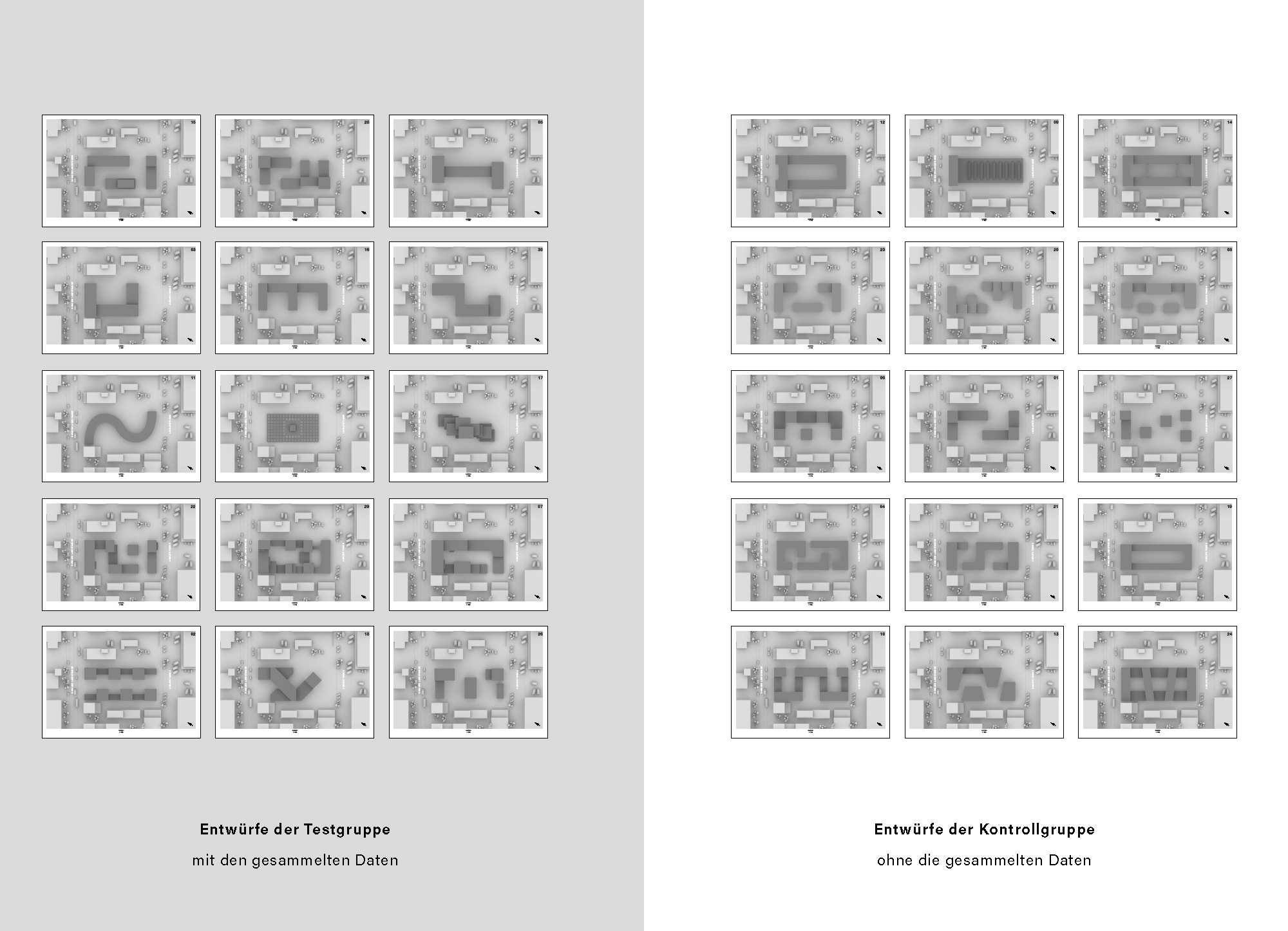
Antriebskraft dieser Arbeit war die Agenda, komplexe architektonische Planungsprozesse für alle beteiligten Akteure und Interessengruppen demokratischer zu gestalten. Dass solche Prozesse nicht unbedingt effizienter und schneller im wirtschaftlichen Sinne sind, hat sich auch bei der Anwendung der hier entwickelten Werkzeuge gezeigt. So ist der Entwurfsprozess oft nicht nur als Problemlösungs-, sondern eben oft auch als Problemfindungsprozess zu sehen.
Der Konfigurator ist auf der Webseite „http://reptiles-project.com" erreichbar.

Double-Layer, Light-Weight, Self-supporting Structures
Based on Robot-Aided Plastic Sheet Thermoforming
The thesis aims to outline an innovative strategy for the creation of lightweight self-supporting structures through the employment of robot-aided sheet panel thermoforming. Research objectives focus on the synthesis of material behavior on a local scale and structural performance on a global scale via advanced computational and robotic methods. A computational workflow that integrates Finite Element Analysis, geometrical optimization, and robotic tool path planning has been developed. The proposed methodology is applied on a range of panels with a custom-built robotic fabrication setup for the design, fabrication, and assembly of a one-to-one scale working prototype.
Traditional sheet forming techniques employ incremental deformations to a sheet until it is formed into its final shape, and the forming tool can be attached to a CNC machine or a robotic arm. Robotic metal sheet forming opens new opportunities in the design and fabrication of component-based aggregations that can be facilitated for cladding purposes or spatial enclosures. The versatility, multi-axis freedom, precision, and adaptable programmability of a generic robotic arm introduces new approaches and techniques to the metal sheet forming process.
The thesis presented focuses on the geometrical, structural and material properties within the agency of robotic plastic sheet thermoforming. Double-skin load-bearing structures, typically referred to as “stressed skins”, have widespread use in the automotive and aerospace industries where monocoque chassis and airplane wings make structural use of the exterior skin as well as the internal network of ribs to create structural elements with high flexural stiffness and low weight per unit area. A typical stressed plastic section works like a conventional I-beam, where the top and bottom skins bear tensile and compressive forces, and the expanded cones transfer shear forces, enabling the two skins to work in a composite manner.
The method described in the thesis aims to propose a holistic approach that facilitates the structural performance of thermoformed plastic sheets for the design, robotic fabrication, and construction of lightweight and self-supporting structures. There are inherent structural properties to thermoformed plastic sheets which can be employed to achieve an integrated building system capable of modulating and responding to various environmental conditions without the need for a secondary supporting structure.